-
Wireless Networks Using XBee Radios:Demonstrations and Applications
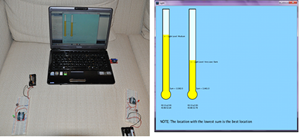
The purpose of this project is to learn about the basics of the Zigbee standard and XBee radios by demonstrating different applications. This project first introduces the main concepts of Zigbee and how XBee radios communicate. The concepts are further explored by demonstrating three different applications. These applications are the simple XBee chat, API packet sender/receiver and wireless sensor network (WSN). This WSN enables us to measure the light levels in different locations to determine the best location for installing solar panels. The application highlights the advantages of using wireless sensor networks in monitoring and measuring remote readings and then processing them through a centralized station.
-

Virtual Keyboard
As technology is advancing, people are looking for easier and faster ways of interaction between themselves, the technology, tools and machinery. In order to overcome the difficulty of large machinery and technology this project aims to design a keyboard which discards the need of a traditional physical button. This project is called a virtual keyboard; one of the many types of Virtual keyboards that allow the users to interact with PDA’s, mobile devices and lots more, with the ability of having full physical keyboard capabilities. This projection keyboard is a form of computer input device whereby the image of a virtual keyboard is projected onto a flat surface. When a user's fingers are placed on the projected keys; the device translates them into keystrokes. Our project consists of 3 main modules; illumination module, sensing module and projection module. The illumination module is a 650nm class II laser that emits a plane of red light. The sensing module is a camera that is responsible to detect the visible light reflected from the finger. Lastly, the projected keyboard helps a user to type in some letters just like a true keyboard.
-
Line Following Robot
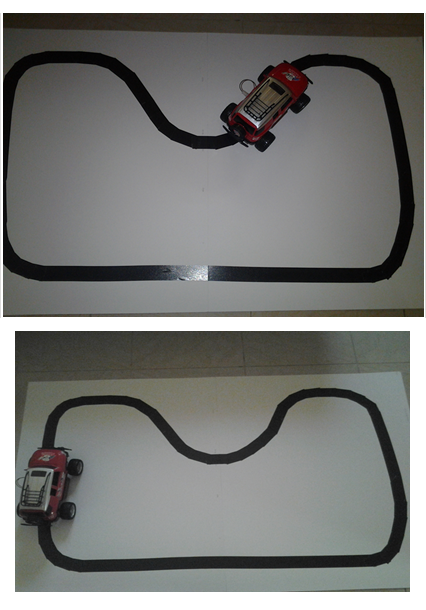
The Line Follower Robot is a simple machine, designed to be able to detect and follow the line drawn on a path without getting off the line too much. This path can be either visible like a black line on a white surface or invisible like a magnetic field. This Robot should sense the line with its 8-Infrared Ray (IR) sensors that have installed under the body. When that happens, the circuit inside takes the input signals from the sensors and controls the speed of wheels’ rotation by transmitting the data to the processor by specific transition buses. Then, the processor is going to decide the proper commands and then it sends them to the driver then the motor slows down or even stops. Then the difference of rotation speed makes it possible to make turns, and thus the path will be followed by the line follower robot.
-

An Intelligent Traffic Signal Control System
The project is designed to develop an intelligent traffic signal control system based on traffic congestion level. The traffic signal timing modifies spontaneously on detecting the traffic density at the intersection. Traffic congestion is considered to be a critical problem in many major cities across the world and it has become a nightmare for the drivers in these metropolises. Standard traffic light system is based on fixed time which cannot be changed as per varying traffic density. Sometimes higher traffic density at one side of the intersection requires longer green time as compared to standard assigned time. The proposed control system using a microcontroller of PIC16F8 series accordingly interfaced with sensors to vary the junction timing automatically to accommodate congestion, avoiding unnecessary waiting time at the intersection. The sensors used in this project are IR and photodiodes and used in line of sight alignment across the loads to detect the density at the traffic signal. The density of the traffic is measured in three zones; low, medium, high based on which timings are assigned.
-
Smart Fire Alarm and Suppression System
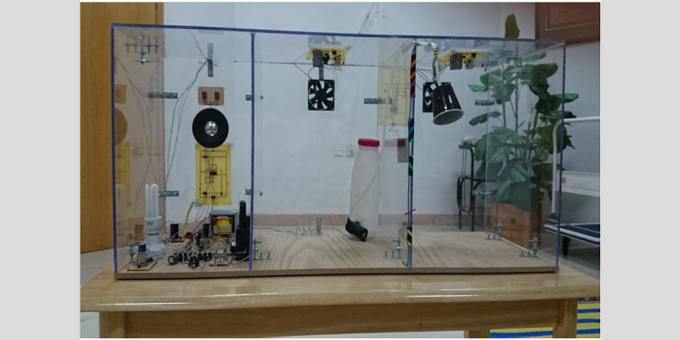
This project is a smart fire alarm and suppression system (FA&S). The system has three main sections: the input devices distributed in the rooms which are basically smoke and temperature detectors, wireless transmission and control panes with the associated outputs. The outputs include location/zone display, sound alarm, fan and water pump operation, electricity shutdown and power return. The project produces a working model featuring all the working circuits along with a small house connected to this fire alarm system.
-
Ultrasonic Security System
-

Automated Football Match
-

Automated Grading System if Handwritten Answer Sheets
-

IoT Dustbin
-

Underwater Fish Classification using ROV with Palm Tree Detection
-

Rain IoT Sensor
-

Home/Self-Assistant Robot
-

Augmented Reality Drone with Palm Trees Classification